Lab 1B
This is the second part of Lab 1. Now that I've built familiarity with the Artemis microcontroller, I'm practicing building bluetooth systems on it. This section of Lab 1 will document my progress.
ECHO
Using robot_cmd.get_next_value(), I can retrieve the string sent from my pc to the Artemis over Bluetooth. I can then send the string back by storing the string in tx_estring_value and sending it over using writeValue(). To confirm that this worked, I also serial printed the text to the serial monitor in the Arduino IDE.
After importing ble, I can connected to the Artemis from my laptop.
I can call the ECHO command, pass in text, and see it get sent back from the Artemis.
The Arduino IDE serial monitor also confirms that the Artemis received the correct command.
SEND THREE FLOATS
robot_cmd.get_next_value() also works with float datatypes. The ble library uses the "|" character to parse the floats so that I can pass multiple values in one commanding message.
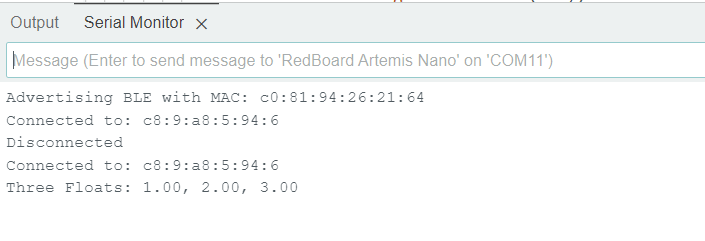
After sending the floats 1.0, 2.0, and 3.0, we should expect to see that they should up in the serial monitor on the Arduino IDE.
Seeing these values show up in the serial monitor confirms that the code works.
GET_TIME_MILLIS
Now that we've successfully sent around data generated by the PC, we can try sending data generated by the Artemis itself.
Calling the command makes the Artemis send back the time since boot in milliseconds. According to the data, the Artemis had been on for a little under 5 minutes before this command was called.
Notification Handler
A notification handler is an special method used to pass as an argument into the start_notify() method. start_notify() passes some bytearray into the notification handler whenever a specified characteristic in a service (specified by a UUID) is updated on the Artemis side. By sending time data with each payload, we can measure how fast we can send data between central device and peripheral.
Here is the code for the notification handler. I won't know if it works until I test it in the next section.
GET_TIME
I wrote a command in the Artemis that will write a value to the tx_characteristic_string as fast as it can for 3000 milliseconds. Each time the notification handler detects that the Artemis' characteristic has updated, it will retrieve that value and get parsed by my notification handler. In my code, I'm sending the time in milliseconds since the loop started, and the number of times the loop has run. This gets handled by my notification handler.
By the end of 3000 milliseconds, the notification handler was updated 126 times. 126 transactions / 3 seconds results in an effective data transfer rate of 42 payloads per second, or once per 24 milliseconds.
SEND_TIME_DATA
This one was a little more complicated. I initially made an array of length 100 and then sent each data point
into the characteristic one at a time, but since the rate at which notification handler can read data is my main
bottleneck, this method is really inefficient. It would be better to fill the characteristic with data, (with like,
20 datapoints, for example) and then send all that over. So I made some code that did that.
int count = 0;
while (count < (sizeof(values) / sizeof(values[0]))) {
tx_estring_value.clear();
while ((tx_estring_value.get_length() < 120) && (count < (sizeof(values) / sizeof(values[0])))) {
tx_estring_value.append(values[count]);
count++;
if ((tx_estring_value.get_length() < 119) && (count < (sizeof(values) / sizeof(values[0])))) {
tx_estring_value.append("|");
} else {
break;
}
}
tx_characteristic_string.writeValue(tx_estring_value.c_str());
The code I wrote fills tx_estring_value until its close to full, and then updates the characteristic.
Then, it fills tx_estring_value again and repeats until it has iterated over the entire data array,
which can fill the rest of memory.
UPDATE_TIME_DATA collects a bunch of datapoints into the array, and then SEND_TIME_DATA sends all
of that data in an efficient manner. In this picture, I sent an array of time data 2000 samples long in
a little under a second.
GET_TEMP_READINGS
With all the infrastructure to effectively send as much data as I want from the previous section,
all I need to do to add temperature data is add the second array, populate it, and add a ","
character in the characteristic's string.
Effectively, I'm sending "time,temperature|time,temperature|..." By setting up a notification handler
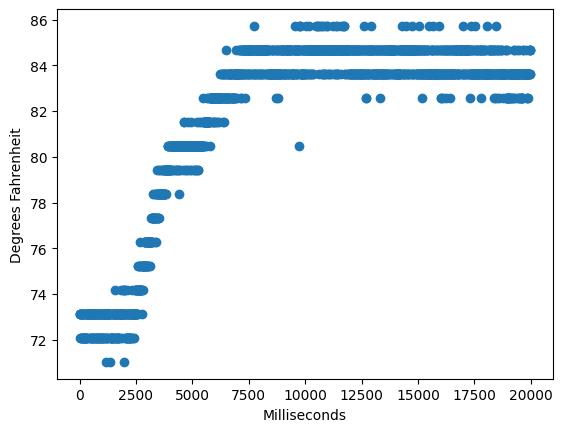
to continuously store the data into a list, I can collect 2,000 data samples over 20 seconds. My
notification handler stores all the data in a "times" and "temps" list. You can see there are 10
milliseconds between each sample.
In this test, I started blowing gently on the Artemis once I started collecting data, and you can see the
temperature start at 72 degrees, rise over a few seconds, and then saturate at around 84 degrees F.
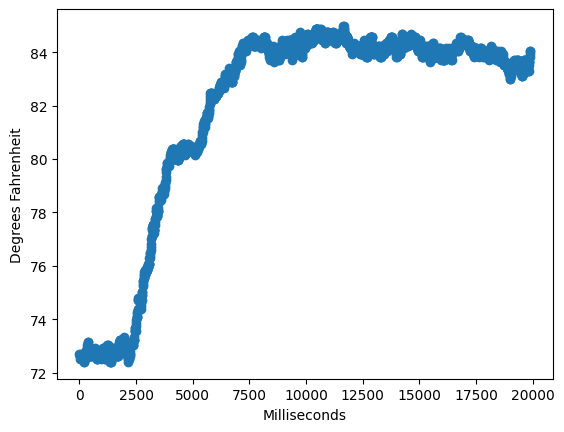
As you can see, there are some pretty significant sampling quantizations happening here. Luckily for us,
there are a shit ton of samples. So, I made a quick convolution moving average in numpy and applied it to the
data:
This method of sending data is super powerful because you can store over 300 kB of data in the chip's SRAM,
and then send all of it wirelessly. I don't think it takes that much compute either. The main slowdown is
waiting between updating the characteristic so that the notification handler has time to retrieve it, but
I'm sure you could set up a time-based alarm interrupt to send the data so you're not idling, or if the
chip knows when something is accessing its characteristic, then interrupt based on that semaphore instead.
Easy peasy.
Streaming vs Downloading
In this lab, we transmitted data using two methods. Method 1 involved using a notification handler to
sent data constantly at a certain rate (42 payloads/second). Method 2 involved acquiring a bunch of data,
packaging it, and sending it in one big set of payloads. Both of these methods sent data, but using different schemes.
Overall, the payload size is less for method 1, meaning that it is less efficient. You can send roughly the same
number of payloads, but make them bigger to send more data. Method 2 is far better in my opinion. Furthermore,
you could parallelize data collection and sending data using time-based interrupts for the data sampling and
event-based interrupts for sending data so that you have both a high datarate and constant + consistent data
collection. One could build a system that first collects a burst of data and then sends it, but an inconsistent
sampling rate would really mess us any Z-transformation math or controls that rely on a consistent sampling rate.
Generally, I would choose method 2 because of the fast data rate. The data rate of method 2 is 42 payloads/second
* 512 bytes/payload = 21,504 bytes per second
or 21.5 kB/s. By comparison, I just did an internet speed test on Upson Hall internet, and I'm getting around 50
MB/s, around 2000 times faster.
With 384 kB of RAM, the Artemis board could cache a lot of data before sending. If a single sample requires a
4 byte int for time and 4 byte float for temperature, you can take 384k / 8 = 48,000 samples. At the full data
rate of 21.5 kB/s of BLE, it would take around 17 seconds to send all that data. For such a simple, cheap, and
wireless system, I think that's pretty good.