Task A
Flip
This flip is an exercise in open loop control. I have to get my robot to flip over, and then land on its wheels. To do this, I need to get my robot to rotate 180 degrees in the air. This is a lot of angular momentum, and I need to build it up by accelerating quickly. In addition, I need a lot of grip on my wheels to transfer torque into the ground.
To do this, I applied double-sided 3M tape to my front two wheels. I decided that it wasn't worth it to put tape on all four wheels because on deceleration, only the front two wheels are going to be pushing against the ground.
After I first added the tape, the car became completely stuck to the ground. It turns out that 3M makes some really good tape. I added a video of this behavior at the end of the lab report, in the bloopers section. After peeling my car off the ground, I rolled it around carefully to collect some dust on the tires so that they would be the right amount of stickiness to accelerate, decelerate, and flip.
In addition, to make flipping easier, I also moved the center of gravity of my car up and to the front of the car by taping a handful of M10 screws to the chassis. This made the car much easier to flip because the mass of the screws would pull the car forward and over as it decelerated.

Test Setup
I set up a test rig to test my flip similar to the one that was available in the hallway outside of the fast Robots lab. I used a line in the floor to mark my starting point, and a rectangular pad of duct tape as the traction pad, although this ended up not being very necessary to flip. I also put a large cardboard box at the end of the traction pad so that the ToF sensor would be able to sense the "wall."
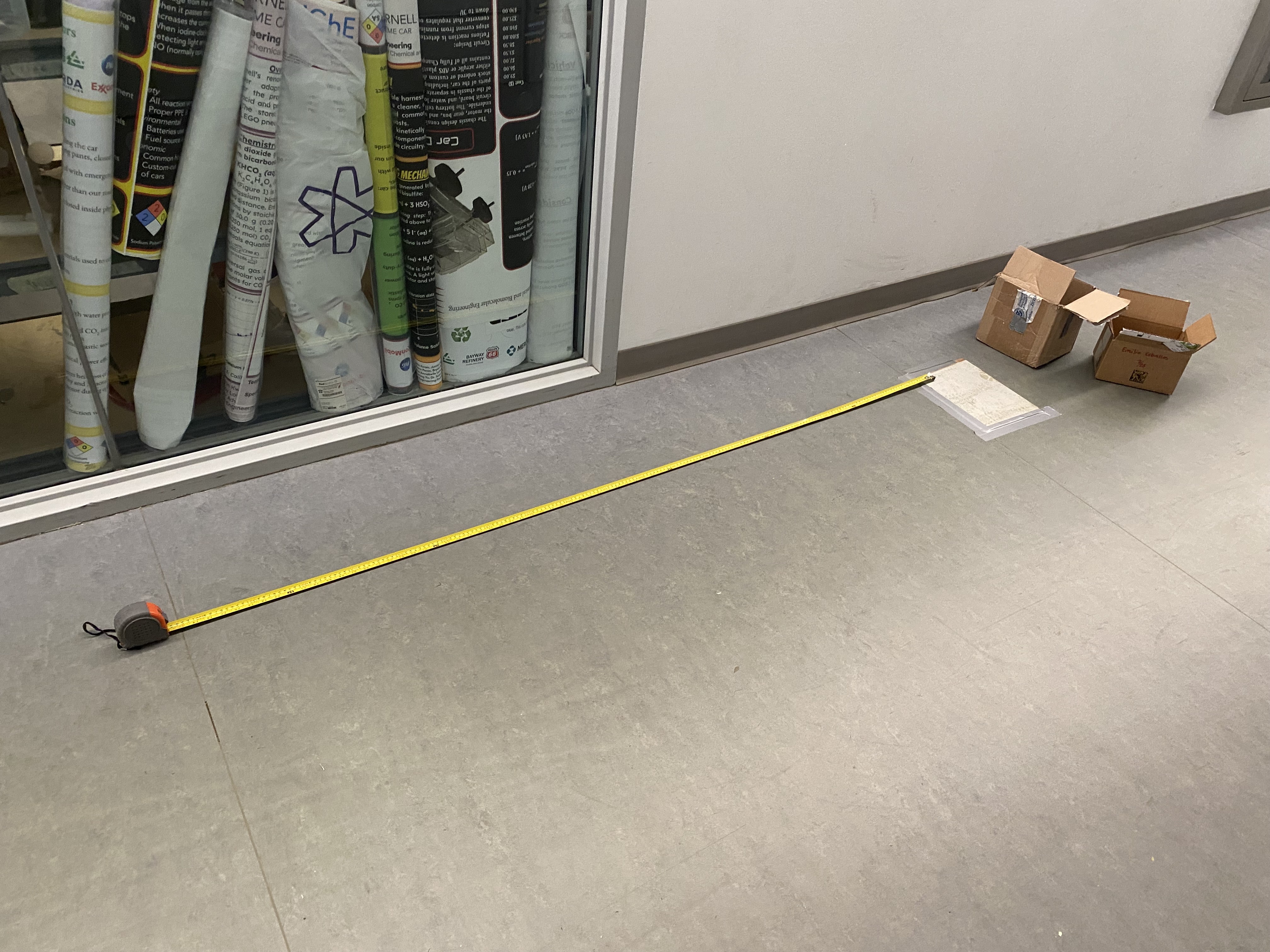
The distance between the traction pad and the starting line of the test was 80 inches, or a little over two meters.


After tuning my series of commands, I was able to reliably get the car to flip over and return to the start line.